Arduino Kullanarak Ses Kontrollü Ev Otomasyonu
Arduino kullanarak ses kontrollü Ev Otomasyonu: Bu projede, ev cihazlarını kontrol etmek için bir ses fonksiyonu kullanıyoruz. Bu proje, Ev Otomasyonu serimin bir parçasıdır.Bu projede S2 Terminal uygulamasını kullanıyoruz bunda AMR_Voice uygulamasını kullanıyoruz. Bu uygulama ücretsizdir ve kullanımı çok kolaydır. Bu projenin gerçek hayatta kullanımı çok kolaydır. Her yaştan insan sadece komutları söyleyerek onu kontrol edebilir. Bu Arduino tabanlı proje , IR ve PC tabanlı olanlardan daha geniş bir menzile sahiptir. Bu projeyi yapmadan önce, HC 05 Bluetooth modülünü Arduino ile kullanımını biliyor olmalısınız.

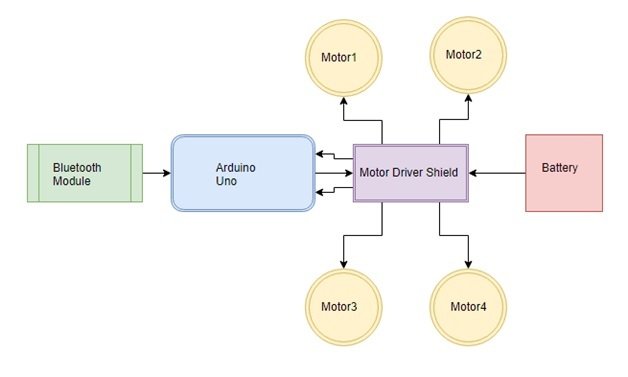
Ses Kontrollü Tabanlı Ev Otomasyonunun Blok Şeması
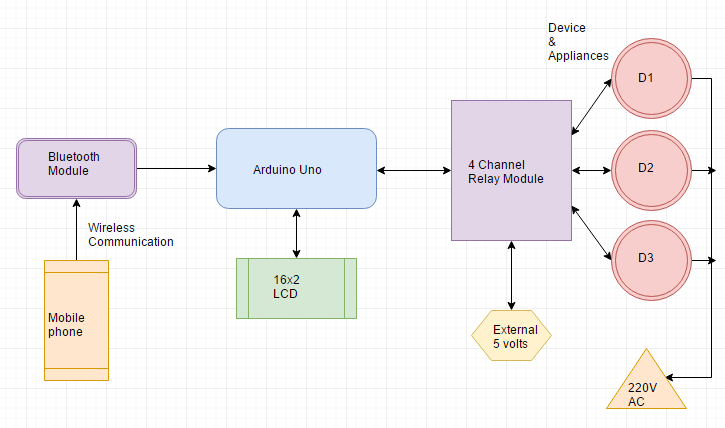
Arduino kullanan ses kontrollü ev otomasyon sistemi için gerekli bileşenler
- Arduino Uno: Sadeliği nedeniyle Arduino kullanıyoruz ve aynı zamanda LCD, Bluetooth modülü ve röle modülü ile arayüze çok fazla dijital pin sağlıyor.
- HC-05 Bluetooth Modülü: HC-05, cep telefonu ile iletişim kurmak için kullanılır.
- 4 Kanal Röle Modülleri: Bu projede kullandığımız modül HL-54S'dir. Arduino'dan 5v mantıksal bir sinyal kullanarak açılır ve kapanır. 250VAC ve 10A'ya kadar dayanabilir. Bu modüllerin 4 kanalı vardır, böylece bir seferde 4 AC cihazı kontrol edebiliriz.
- 16 × 2 LCD: LCD, proje adını, girilebilen komutların listesini görüntülemek için kullanılır, daha sonra herhangi bir komut vermek ve girilen komutun durumunu göstermek ister. 16 × 2 LCD kullanıyoruz çünkü Arduino ile arayüz kolay ve fiyatı çok ucuz. Ekranın kontrastını kontrol etmek için 10k potansiyometre kullanılır
- Tutuculu AC ampuller: AC ampuller, cihazları temsil etmek için kullanılır. Çünkü herhangi bir AC projesinin prototipini oluştururken kullanımı kolaydır ve çok kullanışlıdır. Nihai üründe sadece kontrol edilecek cihazlarla değiştirin.
- Fişli AC kablosu: Daha yüksek voltajlarla çalışırken kaliteli kablo kullanmanızı tavsiye ederim. Bağlantıları korumak için elektrik bandı kullanmak her zaman iyidir.
- Harici 5 Volt besleme: Bir röleyi açıp kapatmak için 5 voltluk dc besleme gereklidir. Aksi takdirde işe yaramadı. Ayrıca, Arduino'dan 5v vermeyin.
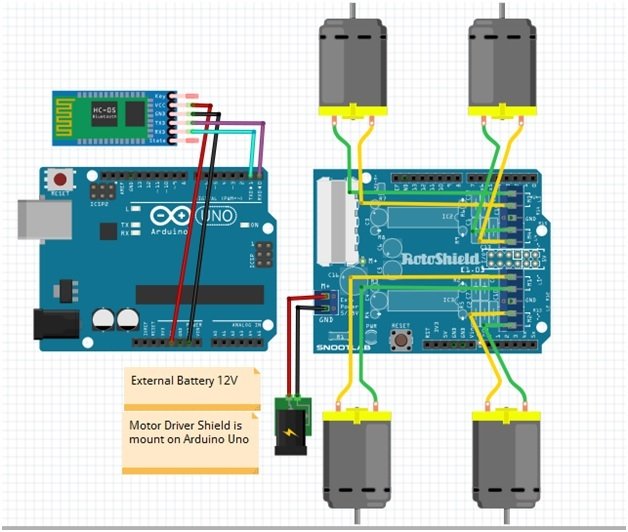
Arduino kullanan ses kontrollü ev otomasyon sisteminin Devre Şeması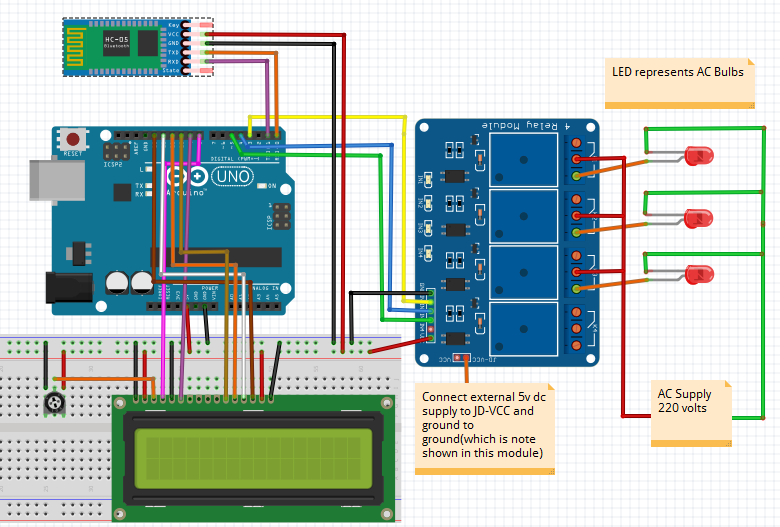
Bağlantılar:
Bluetooth Modülü HC-05
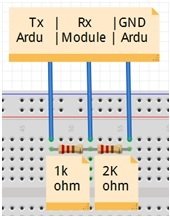
- HC-05 Rx - Arduino Tx.
- HC-05 Tx ila Arduino Rx.
- Vcc'den 5v'ye
- Yerden yere.
16 × 2 LCD:
- V SS toprağa.
- V DD , besleme gerilimi için.
- V O , 10k potansiyometrenin pimini ayarlamak için.
- RS'den Pin 8'e.
- RW toprağa.
- Pin 9'u etkinleştirin.
- LCD D4 ile Pin 10 arası.
- LCD D5 - Pin 11.
- LCD D6'dan Pin 12'ye.
- LCD D7'den Pin 13'e.
- Potansiyometrenin bir ucunu topraklayın.
- Potansiyometrenin diğer ucuna 5v.
4 Kanal Röle modülleri:
- Harici 5 volt'tan JD V CC'ye .
- Yerden yere.
- Ini1'den Pin 3'e.
- Ini2'den Pin 4'e.
- Ini3'ten Pin5'e.
- Vcc'den Arduino 5v'ye.
- Tüm ampullerin bir terminalini normalde açık olan röle terminaline bağlayın.
- Rölenin tüm ortak terminallerine 220VAC'nin bir ucu ve başka bir ampul terminali ile diğer ucu.
Ses kontrollü ev otomasyon sisteminin çalışması
Önceden tanımlanmış komutları AMR_Voice uygulamasına seslendiriyoruz. Uygulama, komutu daha sonra Arduino tarafından alınan ve açıklanan görevi yerine getiren Bluetooth'a gönderir. Aynı zamanda Arduino, durumu LCD'de görüntüler ve seri monitöre yazar. Her komutun kodda tanımlanan benzersiz işlemleri vardır. Komutları kendi rahatınıza göre değiştirebilirsiniz. Komutların listesi aşağıdadır.
Komutlar: Cihazları açmak ve kapatmak için kullanıcı tarafından aşağıdaki komutlar söylenmelidir.
| Cep telefonundan komut gönder | Monitörde mesaj ekranı |
| beyaz | Beyaz AÇIK |
| beyaz kapatma | Kapalı beyaz |
| mavi açık | Mavi AÇIK |
| mavi kapatma | Mavi KAPALI |
| yeşil | Yeşil AÇIK |
| yeşil kapanma | Yeşil KAPALI |
Ses kontrollü ev otomasyon sistemi kodu
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 9, 10, 11, 12, 13);
#define white 3
#define blue 4
#define green 5
int tx=1;
int rx=0;
char inSerial[15];
void setup(){
Serial.begin(9600);
pinMode(white, OUTPUT);
pinMode(blue, OUTPUT);
pinMode(green, OUTPUT);
pinMode(tx, OUTPUT);
pinMode(rx, INPUT);
digitalWrite(white, HIGH);
digitalWrite(blue, HIGH);
digitalWrite(green, HIGH);
lcd.begin(16, 2);
lcd.clear();
lcd.print("MICROCONTROLLERS ");
lcd.setCursor(0,1);
lcd.print(" LAB ");
delay(2000);
lcd.clear();
lcd.print("VOICE CONTROL");
lcd.setCursor(0,1);
lcd.print("HOME AUTOMATION ");
delay(2000);
lcd.clear();
lcd.print("1. Bulb 1 WHITE");
lcd.setCursor(0,1);
lcd.print("2. Bulb 2 BLUE");
delay(2000);
lcd.clear();
lcd.print("3. Bulb 3 GREEN");
delay(2000);
lcd.clear();
lcd.print("Bulb 1 2 3 ");
lcd.setCursor(0,1);
lcd.print(" OFF OFF OFF");
}
void loop(){
int i=0;
int m=0;
delay(500);
if (Serial.available() > 0) {
while (Serial.available() > 0) {
inSerial[i]=Serial.read();
i++;
}
inSerial[i]='\0';
Check_Protocol(inSerial);
}}
void Check_Protocol(char inStr[]){
int i=0;
int m=0;
Serial.println(inStr);
if(!strcmp(inStr,"*white on#")){
digitalWrite(white, LOW);
Serial.println("White ON");
lcd.setCursor(4,1);
lcd.print("ON ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
if(!strcmp(inStr,"*white off#")){
digitalWrite(white, HIGH);
Serial.println("White OFF");
lcd.setCursor(4,1);
lcd.print("OFF ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
if(!strcmp(inStr,"*blue on#")){
digitalWrite(blue, LOW);
Serial.println("Blue ON");
lcd.setCursor(8,1);
lcd.print("ON ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
if(!strcmp(inStr,"*blue of#")){
digitalWrite(blue, HIGH);
Serial.println("Blue OFF");
lcd.setCursor(8,1);
lcd.print("OFF ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
if(!strcmp(inStr,"*green on#")){
digitalWrite(green, LOW);
Serial.println("Green ON");
lcd.setCursor(12,1);
lcd.print("ON ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
if(!strcmp(inStr,"*green of#")){
digitalWrite(green, HIGH);
Serial.println("Green OFF");
lcd.setCursor(12,1);
lcd.print("OFF ");
for(m=0;m<11;m++){
inStr[m]=0;}
i=0;}
else{
for(m=0;m<11;m++){
inStr[m]=0;
}
i=0;
}}Arduino ile kullanımı çok kolay ve bu proje çok az bir çaba ile yapılabilir. Bu projeyi yaparken herhangi bir sorunla karşılaşırsanız bana bildirin.
Bahadır ÖZGEN
Electronic Robotic Coding Research and Development 1975 - ∞
Learn Forever
If you want, let's learn together...
https://roboticcode2020.blogspot.com/
bahadirozgen1975@gmail.com
facebook robotic.code
instagram @roboticcode
Sayfalarımı ziyaret ettiğiniz için teşekkür ederim.Bu sitede mevcut olan içerikler kendi oluşturduğum projeler yazı,resim ve videolardan oluşmaktadır.İçerik oluşturmak çok uzun sürdüğü için bazı projelerde yurtdışı kaynaklardan faydalandım.Buradaki amacım ticari değildir.Kaynağı belli olan ve bizim kaynağına ulaşabildiğimiz materyal (yazı, fotoğraf, resim, video v.b.) için ilgili konularda fotoğraflarda logo varsa v.b. not olarak gösterilecektir.Sitemizde yayınlanan tüm içerik, bizim tarafımızdan ve internet üzerinden youtube, facebook ve blog gibi paylaşıma sunulmuş kaynak sitelerden alındığı için, sitemiz yasal yükümlülüğe tabi tutulamaz. Sitemizde telif haklarının size ait olduğu bir içerik varsa ve bunu kaldırmamızı isterseniz, iletişim sayfamızdan bizimle iletişime geçtiğiniz takdirde içerik yayından kaldırılacaktır.Bu konu ve modüller ile uğraşarak, ileride çok güzel makine ve elektronik aletler yapabilirsiniz.