


ARDUINO ve BLYNK KULLANARAK WIFI KONTROLLÜ ROBOT
ARDUINO ve BLYNK KULLANAN WIFI KONTROLLÜ ROBOT: millet, umarım iyisindir ve harika gömülü sistemler projeleri yaparsınız . Bu, kontrol robotları serimizin üçüncü projemiz. Son yazımızda Arduino'yu kullanarak ses kontrollü bir robot projesi yayınladık . Geçenlerde Engelden Kaçınma ve Sesle kontrol robotu hakkında yazılar yazdım . Bu projede robotu Wi-Fi üzerinden Blynk uygulamasını kullanarak kontrol ediyoruz . Biz kullandığınız ESP8266 Wifi modülü , Motor Sürücü kalkan, Arduino Unove bu projede 4WD Araç şasisi ve akü paketi. Ayrıca, Blynk uygulamasını Google Play Store'dan indirmemiz gerekiyor. Bu, sesten ziyade robotu kontrol etmenin etkili bir yoludur çünkü wifi kontrolü% 100 doğruluğa sahiptir.

Arduino kullanan wifi kontrollü robotun Blok Şeması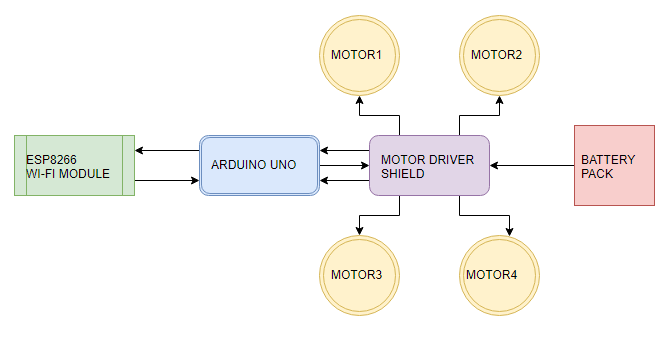
Gerekli Bileşenler:
- Arduino Uno: Arduino Uno bu proje için mükemmeldir çünkü motor sürücü kalkanı ile uyumludur ve ayrıca ESP8266 wifi modülüne güç sağlamak için 3.3v sağlar. Aynı zamanda ucuzdur, kullanımı kolaydır ve daha az yer kaplar, böylece her şey araç şasisine yerleştirilir.
- Motor Sürücü Kalkanı: Motor sürücü kalkanı iki L293D ve 74HC595 IC'ye dayanmaktadır. L293D, dörtlü bir Yarı H sürücüsüdür. Kanal başına 1 ampere kadar iletebilir. 4,5 ile 36 volt arasında geniş bir besleme gerilimi aralığına sahiptir. 0 ile 70 derece santigrat arasında çalışabilir. 74HC595, 3 durumlu çıkış yazmaçlarına sahip 8 bitlik Kaydırma Kaydı'dır. Bu motor sürücü kalkanı, DC motorları, Step motorları ve servo motorları çalıştırmak için kullanılır. Aynı anda 2 servo motor ve 4 DC motoru çalıştırabilir.
- ESP8266 Wifi modülü: ESP8266, ucuz bir Wifi yongasıdır ve tam TCP / IP yığını sağlar. Adından da anlaşılacağı gibi ESP8266 mikro denetleyicisine dayanmaktadır. Modülün pazarında yaklaşık 14 model var ancak ilkini kullanıyorum çünkü Arduino Uno ile kullanmak ve arayüz kullanmak doğu. 3.3V ile çalışır. Ayrıca Arduino pinini kullanabileceğimiz GPIO'ya sahiptir.
- 4wd Araç Şasi: 4 tekerlekli araç şasisi kullandım. 2 platform, 4 lastik, 4 dişli Dc motor ve 4 hızlı enkodere sahiptir. Her şeyi şasiye yerleştirmek için çok fazla alan sağlar, ancak çok kırılgan bir malzemedir ve çok daha az darbeyle kırılır, bu nedenle araba şasisini monte ederken dikkatli olun.
- Pil Paketi: Voltajı artırmak için seri olarak 3 li-ion 3.7V ve 2200mA pil kullandım. Bu hücreler şarj edilebilir, yaklaşık 1000 yaşam döngüsüne sahiptir.
ARDUINO KULLANILARAK WIFI KONTROLLÜ ROBOTUN Devre Şeması
WIFI KONTROLLÜ ROBOT BAĞLANTISI
ESP8266'dan Arduino'ya:
- ESP8266 Vcc pini 3,3v'ye.
- ESP8266 CH_PD pinini 3.3v'ye.
- ESP8266 Rx pinini Arduino Uno Tx'e.
- ESP8266 Tx pini Arduino Uno Rx'e.
Motor Sürücü Kalkanını Arduino Uno üzerine monte edin. Sol motorları ekranın M3 ve M4 terminaline ve sağ taraftaki motorları ekranın M1 ve M2 terminallerine bağlayın.
Pil takımını + M'ye ve blendajın toprak terminaline bağlayın.
ARDUINO KULLANARAK WIFI KONTROLLÜ ROBOTLA ÇALIŞMA
- İndir Blynk Google Play Store'dan.
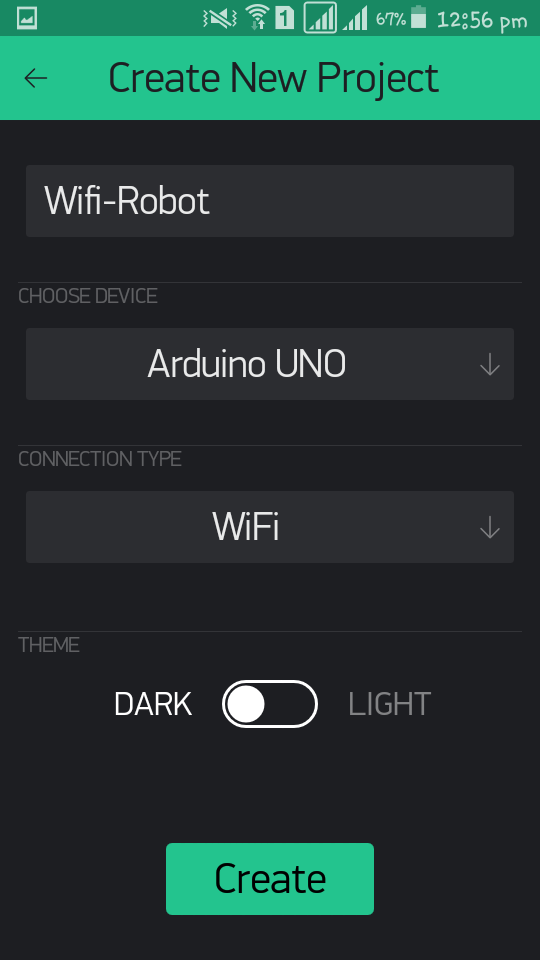
- Uygulamayı açın, Kaydolmanızı ister: Facebook veya Gmail kimliğini kullanarak Giriş Yapabilirsiniz. Yeni Proje'yi seçin ve ardından proje adını girin, cihaz adını seçin ve bağlantı türünü seçin.
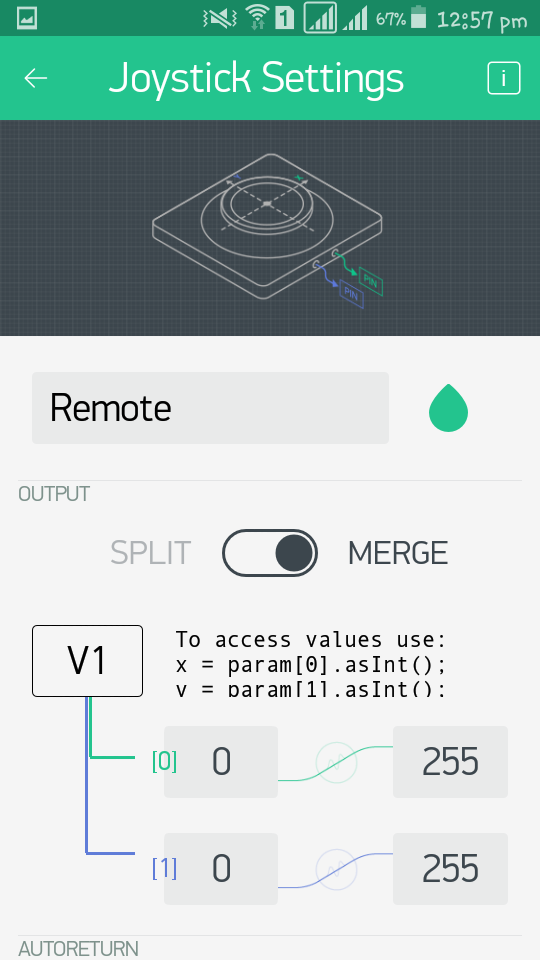
 Widget Box'a gidin ve listeden Joystick'i seçin.
Widget Box'a gidin ve listeden Joystick'i seçin.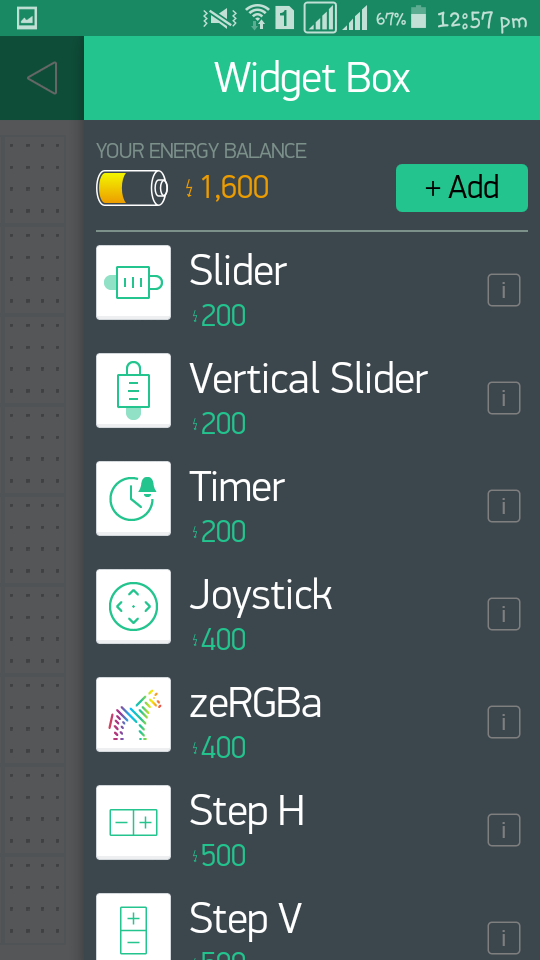
- Ardından Somun simgesine basarak Proje ayarına gidin. Ardından, Tümünü e-posta ile gönder seçeneğini seçin ve kimlik doğrulama jetonunu almak için daha önce girdiğiniz E-posta hesabına gidin.

- E-postayı açın ve Alınan Yetkilendirmeyi kopyalayıp koda yapıştırın. Joy Stick ayarına gidin ve V1 değişkenini seçin.
Rx ve Tx Pinlerini Arduino Uno'dan ayırın ve ardından kodu Arduino'ya yükleyin. RX ve Tx'i Arduino'ya bağlayın SSID'si ve şifresi daha önce kodda tanımlanan Wifi'a bağlanmak için birkaç saniye bekleyin. Blynk Uygulamasını açın ve Robotun hareketini kontrol etmek için kumanda çubuğunu hareket ettirin.
#define BLYNK_PRINT Serial // Comment this out to disable prints and save space
#include <ESP8266_Lib.h>
#include <BlynkSimpleShieldEsp8266.h>
#include <SoftwareSerial.h>
SoftwareSerial EspSerial(2, 3); // RX, TX
#define ESP8266_BAUD 9600
ESP8266 wifi(&Serial);
char auth[] = "281f8675c5cc4c55a4d259ef7518d313";
#include<AFMotor.h>
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR12_1KHZ);
AF_DCMotor motor4(4, MOTOR12_1KHZ);
void setup()
{
// Set console baud rate
Serial.begin(9600);
delay(10);
Serial.begin(ESP8266_BAUD);
delay(10);
Blynk.begin(auth, wifi, "PTCL-BB", "F4C0A9AB"); // wifi username and password
}
BLYNK_WRITE(V1)
{
int x = param[0].asInt();
int y = param[1].asInt();
// Do something with x and y
if(y>220)
forward();
else if(y<35)
backward();
else if(x>220)
right();
else if(x<35)
left();
else
Stop();
}
void loop()
{
Blynk.run();
}
void forward()
{
motor1.setSpeed(255);
motor1.run(FORWARD);
motor2.setSpeed(255);
motor2.run(FORWARD);
motor3.setSpeed(255);
motor3.run(FORWARD);
motor4.setSpeed(255);
motor4.run(FORWARD);
}
void backward()
{
motor1.setSpeed(255);
motor1.run(BACKWARD);
motor2.setSpeed(255);
motor2.run(BACKWARD);
motor3.setSpeed(255);
motor3.run(BACKWARD);
motor4.setSpeed(255);
motor4.run(BACKWARD);
}
void left()
{
motor1.setSpeed(255);
motor1.run(FORWARD);
motor2.setSpeed(255);
motor2.run(FORWARD);
motor3.setSpeed(0);
motor3.run(RELEASE);
motor4.setSpeed(0);
motor4.run(RELEASE);
}
void right()
{
motor1.setSpeed(0);
motor1.run(RELEASE);
motor2.setSpeed(0);
motor2.run(RELEASE);
motor3.setSpeed(255);
motor3.run(FORWARD);
motor4.setSpeed(255);
motor4.run(FORWARD);
}
void Stop()
{
motor1.setSpeed(0);
motor1.run(RELEASE);
motor2.setSpeed(0);
motor2.run(RELEASE);
motor3.setSpeed(0);
motor3.run(RELEASE);
motor4.setSpeed(0);
motor4.run(RELEASE);
}
Bahadır ÖZGEN
Electronic Robotic Coding Research and Development 1975 - ∞
Learn Forever
If you want, let's learn together...
https://roboticcode2020.blogspot.com/
bahadirozgen1975@gmail.com
facebook robotic.code
instagram @roboticcode
Sayfalarımı ziyaret ettiğiniz için teşekkür ederim.Bu sitede mevcut olan içerikler kendi oluşturduğum projeler yazı,resim ve videolardan oluşmaktadır.İçerik oluşturmak çok uzun sürdüğü için bazı projelerde yurtdışı kaynaklardan faydalandım.Buradaki amacım ticari değildir.Kaynağı belli olan ve bizim kaynağına ulaşabildiğimiz materyal (yazı, fotoğraf, resim, video v.b.) için ilgili konularda fotoğraflarda logo varsa v.b. not olarak gösterilecektir.Sitemizde yayınlanan tüm içerik, bizim tarafımızdan ve internet üzerinden youtube, facebook ve blog gibi paylaşıma sunulmuş kaynak sitelerden alındığı için, sitemiz yasal yükümlülüğe tabi tutulamaz. Sitemizde telif haklarının size ait olduğu bir içerik varsa ve bunu kaldırmamızı isterseniz, iletişim sayfamızdan bizimle iletişime geçtiğiniz takdirde içerik yayından kaldırılacaktır.Bu konu ve modüller ile uğraşarak, ileride çok güzel makine ve elektronik aletler yapabilirsiniz.