ESP8266 Wi-Fi modülü ve Arduino ile sunucuya veri gönderin

Giriş ESP8266 Kablosuz modülü
Wireless Fidelity, her tür 802.11 teknolojisini kullanan ürünler için kullanılan bir terimdir. Wi-Fi ağı, lisanssız 2,4 GHz ve 5 GHz radyo frekansı bandında 11 Mbps veya 54 Mbps veri hızı ile çalışır. Wi-Fi özellikli cihazlar, kablosuz erişime sahip konumlardan kablosuz olarak veri gönderip alabilir. Bir Wi-Fi konumunda bulunan erişim noktaları, Wi-Fi özellikli cihazlar için RF sinyali iletir. Bu Wi-Fi özellikli cihazlar, erişim noktası aralığında bulunmaları halinde sinyali alabilir. Veri aktarımının hızı, erişim noktasına beslenen boru hattının hızına bağlıdır.
ESP8266 Wi-Fi modülünün Çalışma Prensibi
Radyo sinyali, Wi-Fi işleminin temelidir. Çalışması için gerekli olan üç unsurdan oluşur.
- Sinyal
- Anten
- Yönlendirici

Radyo sinyalleri anten ve yönlendiriciler tarafından iletilir ve bilgisayarlar gibi Wi-Fi alıcıları tarafından alınır.
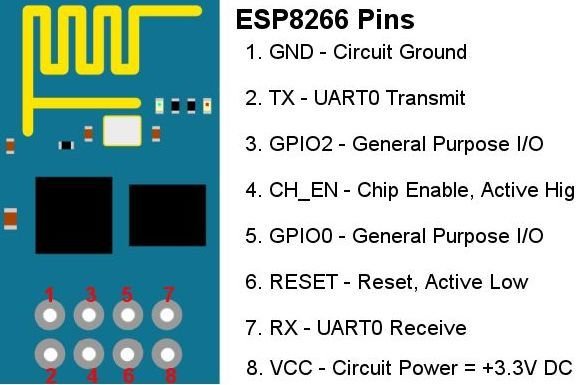
ESP8266 Wi-Fi modülü
Wi-Fi modülünün 2 sıra halinde düzenlenmiş 8 pin çıkışı vardır. Entegre tarafın size bakmasını ve iğnelerin ucunuza daha yakın olmasını sağlamak. Soldan sağa doğru alt sıra
- Tx - İletim pimi
- CH-DO - Kanal Aşağı pimi
- RST - Sıfırla
- Vcc - 3.3V güç kaynağı
Soldan sağa üst satırda
- GND - Güç kaynağı topraklaması
- GPIO_2 - Kullanılmıyor
- GPIO_0 - Kullanılmıyor
- Rx - Alıcı pimi
DHT11 modülü:
DHT modülü 3 çıkış pini ile sağlanır.
- Veri - Dijital Sinyal için
- Vcc - Güç Kaynağı 5V
- GND - Güç Kaynağı topraklaması

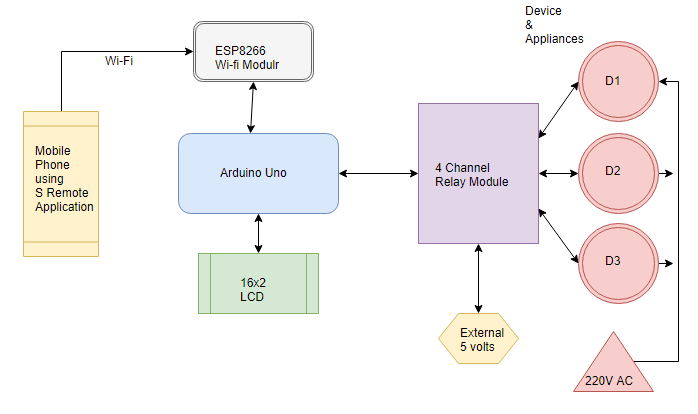
ESP8266 Wi-Fi modülü Arduino ile arayüz oluşturuyor
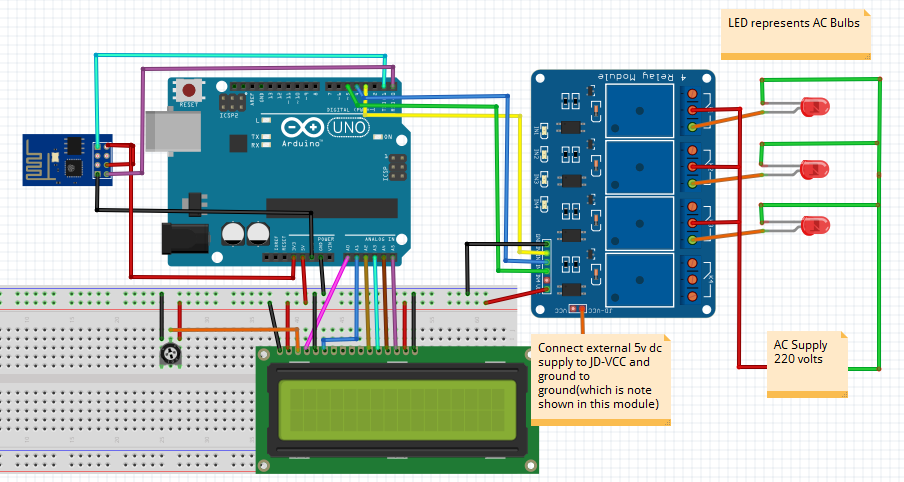
Devreyi aşağıdaki şekilde bağlayın:
- ESP8266 modülünün Tx pini, Arduino'nun D2'si ile
- 10k direnç üzerinden 3V Arduino ile ESP8266 modülünün CH-DO pini.
- ESP8266 modülünün Rx pini, gösterildiği gibi voltaj bölücü aracılığıyla Arduino'nun D3'ü ile.
- 3V Arduino ile ESP8266 modülünün RST pini (şemada gösterilmemiştir).
- 3V Arduino ile ESP8266 modülünün VCC pini.
- Arduino Topraklı ESP8266 modülünün GND pini.

DHT11'i Arduino ile aşağıdaki şekilde bağlayın:
- Arduino'nun pin13'ü ile dht11'in veri pini. (şemada gösterildiği gibi pin2'ye değil pin13'e bağladığınızdan emin olun.)
- 5V Arduino ile dht11'in Vcc pini.
- Arduino'nun GND'si ile dht11'in GND pini.

Tam devre, bunların her ikisinin birleşimi olacaktır.
Devreleri tamamladıktan sonra verilenleri takip edin. Sonuçları sunucuda görüntülemek gereklidir. Sonuçları sitenin "Genel önizleme" sekmesinde göreceksiniz.
ESP8266 Wi-Fi modülünü Arduino ile bağlama prosedürü
- Her şeyden önce, kullanıcının ThingSpeak.com'da bir hesap oluşturması, ardından Oturum Açması ve Başlayın'a tıklaması gerekir.

- Şimdi 'Kanallar' menüsüne gidin ve daha fazla işlem için aynı sayfadaki Yeni Kanal seçeneğine tıklayın.

- Şimdi kanalı oluşturmak için bir form göreceksiniz, seçiminize göre Adı ve Açıklamayı doldurun. Ardından Alan 1 ve Alan 2 etiketlerinde 'Nem' ve 'Sıcaklık' doldurun, her iki Alan için de onay kutularını işaretleyin. Ayrıca aşağıdaki formdaki 'Herkese Açık Yap' seçeneğinin onay kutusunu işaretleyin ve son olarak Kanalı Kaydedin. Şimdi yeni kanalınız oluşturuldu.

- Şimdi 'API anahtarları' sekmesine tıklayın ve Yazma ve Okuma API anahtarlarını kaydedin, burada sadece Yazma anahtarını kullanıyoruz. Bu anahtarı Kodda char * api_key olarak kopyalamanız gerekir.

İsteğe bağlı bir LCD arabirimi için kod verilmiştir. LCD'yi kodda verildiği gibi bağlayabilir ve tüm sonuçların LCD'de görünmesini sağlayabilirsiniz, bunlar seri monitörde de görüntülenir.
[button-brown url = ”https://microcontrollerslab.com/wp-content/uploads/2017/04/wifi.rar” target = ”_ blank” position = ”center”] İndirme kodu [/ button-brown]
Bazı Örnek Uygulamalar:
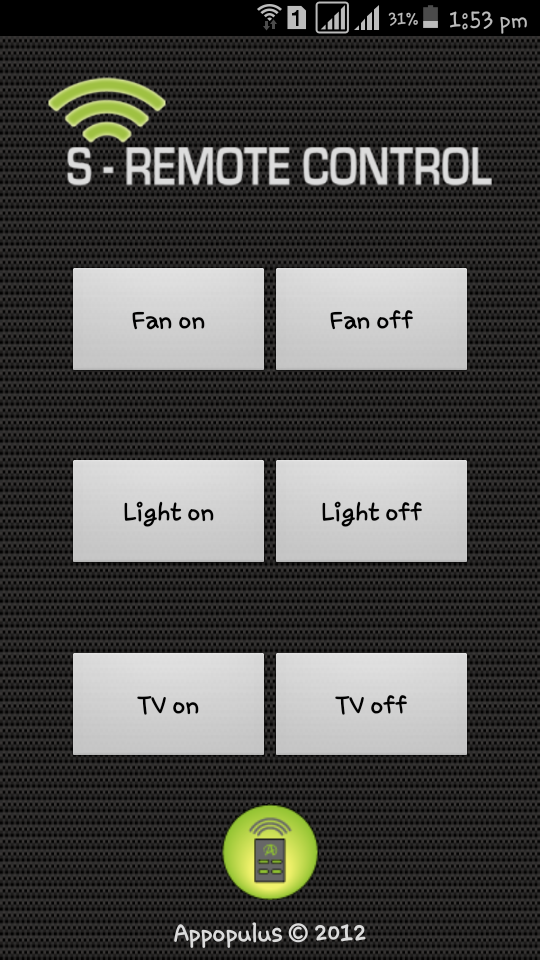
- Mobil uygulamalarda Wi-Fi kullanılmaktadır.
- Wi-Fi, iş uygulamalarında kullanılır
- Ev uygulamalarında Wi-Fi kullanılır
- Bilgisayarlı uygulamada Wi-Fi kullanılmaktadır.
- Otomotiv segmentinde Wi-Fi kullanılmaktadır.
- İnternette gezinirken Wi-Fi kullanılır.
- Wi-Fi, video konferansta kullanılır.
Avantajları:
- Kablosuz dizüstü bilgisayar bir yerden başka bir yere taşınabilir
- Kablosuz Wi-Fi ağ iletişim cihazları kabloların maliyetini düşürebilir.
- Wi-Fi kurulumu ve yapılandırması, kablolama işleminden daha kolaydır
- Tamamen güvenlidir ve herhangi bir ağa müdahale etmez
- İnternete erişim noktaları üzerinden de bağlanabiliriz
- İnternete kablosuz bağlanabiliriz
Dezavantajları:
- Wi-Fi, insan sağlığına zarar verebilecek radyasyonlar üretir
- Sunucuyu kullanmadığımız zamanlarda Wi-Fi bağlantısını kesmeliyiz
- Verilerin aktarılmasında bazı sınırlamalar vardır, verileri uzun mesafelere aktaramıyoruz.
- Wi-Fi uygulaması, kablolu bağlantıya göre çok pahalıdır.
Bahadır ÖZGEN
Electronic Robotic Coding Research and Development 1975 - ∞
Learn Forever
If you want, let's learn together...
https://roboticcode2020.blogspot.com/
bahadirozgen1975@gmail.com
facebook robotic.code
instagram @roboticcode
Sayfalarımı ziyaret ettiğiniz için teşekkür ederim.Bu sitede mevcut olan içerikler kendi oluşturduğum projeler yazı,resim ve videolardan oluşmaktadır.İçerik oluşturmak çok uzun sürdüğü için bazı projelerde yurtdışı kaynaklardan faydalandım.Buradaki amacım ticari değildir.Kaynağı belli olan ve bizim kaynağına ulaşabildiğimiz materyal (yazı, fotoğraf, resim, video v.b.) için ilgili konularda fotoğraflarda logo varsa v.b. not olarak gösterilecektir.Sitemizde yayınlanan tüm içerik, bizim tarafımızdan ve internet üzerinden youtube, facebook ve blog gibi paylaşıma sunulmuş kaynak sitelerden alındığı için, sitemiz yasal yükümlülüğe tabi tutulamaz. Sitemizde telif haklarının size ait olduğu bir içerik varsa ve bunu kaldırmamızı isterseniz, iletişim sayfamızdan bizimle iletişime geçtiğiniz takdirde içerik yayından kaldırılacaktır.Bu konu ve modüller ile uğraşarak, ileride çok güzel makine ve elektronik aletler yapabilirsiniz.